Pseudorandom Motion Mechanism
Written by Brian Leach for our Autumn 2018 Newsletter
Inspiration
This was a combination of things. One was an eccentric drive on a turntable to a spitfire plane built by Dick Watson. The turntable would turn-stop-turn showing all the sides of the plane.
Also, my fruit machine reel mechanism from 2008 was not very random and that has bugged me.
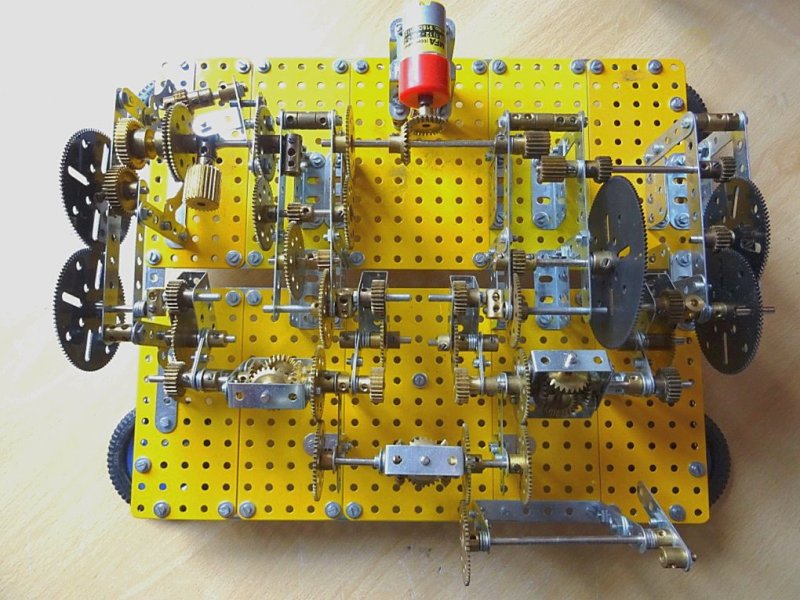
The pseudorandom motion mechanism
Eccentric Drive
The left-hand gear is the eccentric gear and is fixed to its eccentric rod. The middle gear which is hanging and speeds up or slows down depending on where the eccentric gear is in its cycle. It also goes up and down. The right-hand gear just provides a fixed point for the output.
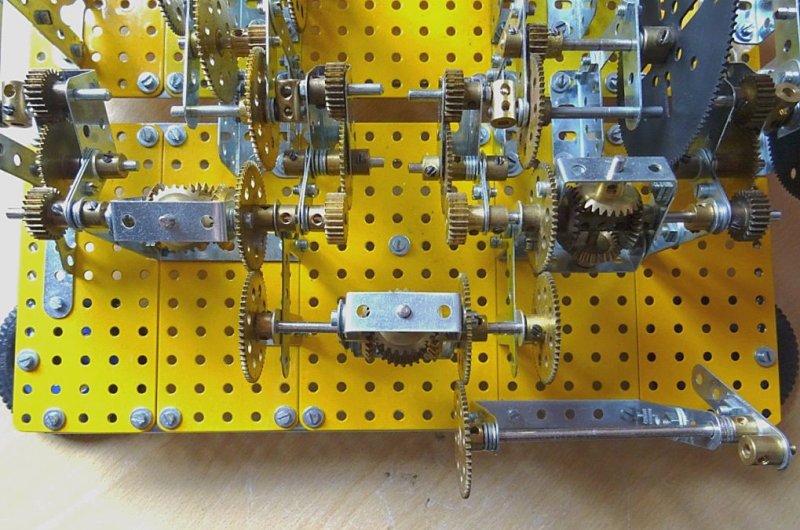
Pseudorandom motion mechanism detail
So that’s a speed up/slow down but it is not random. By using four eccentrics with different gear ratios form the common motor, we can get varying cycles of speeding up/slowing down.
Gear Ratios
The four gear ratios must not have any factors in common. I chose:
- 16:1 — 4:1 and 4:1
- 21:1 — 7:1 and 3:1
- 25:1 — 5:1 and 5:1
- 19:1 — Epicyclic gearing: 60-tooth Gear Wheel for stationary gear; 57-tooth Gear Wheel for output gear.
The number of input revolutions for all the eccentrics to be in the same position again is 16 x 21 x 25 x 19 which is 159,600. At a modest 500rpm input that takes over five hours!
We still have the four eccentric outputs. These need to be added together. Three differentials used in reverse achieve this.
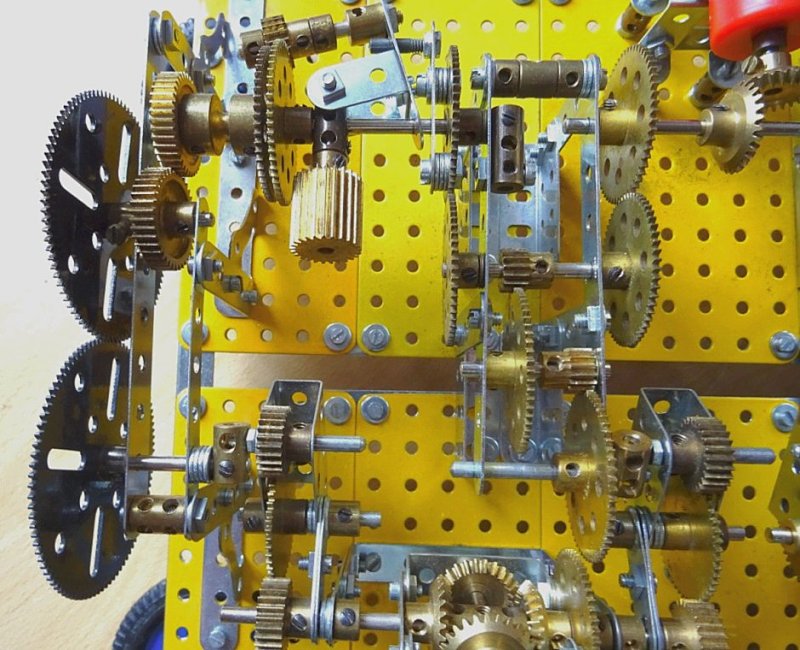
Pseudorandom motion mechanism detail
The output is interesting. All the eccentric outputs could be moving in which case it turns quickly. One or more could be stopped in which case it turns slowly. Occasionally all are stopped in which case it stops. That is rare, occurring only about once a minute. When stopped it quickly transitions to fast because all the eccentrics start moving again.
The uses for this are limited — a Meccanograph; maybe a fish or something similar moving in a mobile; or fruit machine reels.
See more photos and a video of this mechanism.